
今回は「Emax Tinyhawk II Freestyle」をレビューしていきます。

ドローン Emax Tinyhawk II Freestyle スペック
| カメラ | RunCam Nano 2 Camera |
|---|---|
| 重量 | 49.1g |
| フレーム | 115mm |
| FC、ESC | F4(MATEKF411RX firmware) 4 IN 1 5A ESC |
| VTX | 0-25-100-200mW |
| モーター | TH1103-7000KV |
| レシーバー | FC内蔵レシーバー(Compatible with Frsky remote control D8 mode) |
| 価格 | 13000円くらい |
Emax Tinyhawk II Freestyle ドローン レビュー

まずは開封レビューから。
専用の収納ケース付き
Emax Tinyhawk II Freestyle ドローン セット内容

1 x Tinyhawk II Freestyle 2.5 Inch FPV Racing Drone
2 x Emax 1s HV 450 mAh Battery
1 x Charger
1 x Propeller Set (4x CW, 4x CCW)
1 x Screw Pack
1 x User Manual Website Card
セット内容はこんな感じです。
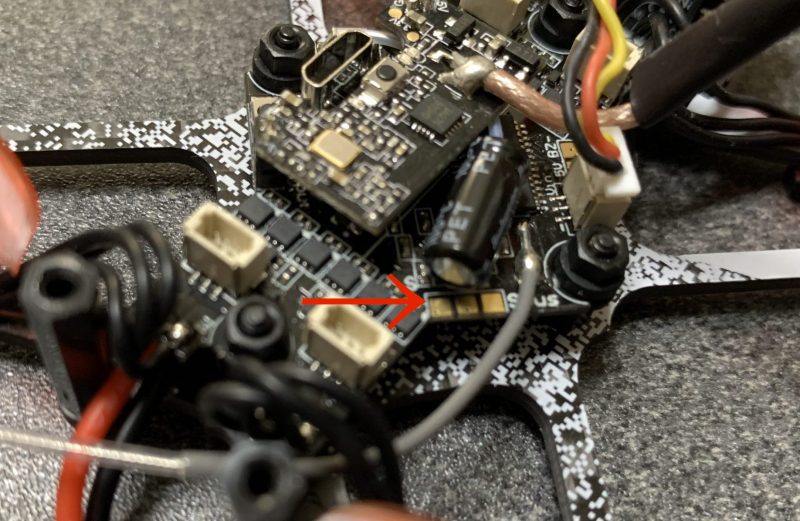
Emax Tinyhawk II Freestyle ブザーの取り付け
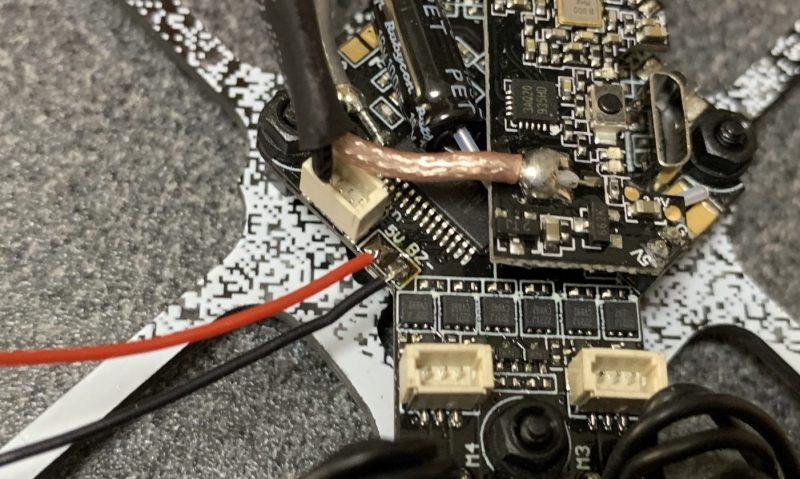
ブザーの取り付けは上の画像の位置になります。
カメラの配線とVTXのアンテナが邪魔なので、カメラの配線はパコッとカプラから外して、アンテナは結束バンドで固定されているのでカットしてから作業するとやりやすいです。
まぁそのままで、ハンダつけできないことはないです。

ブザーの位置はちょうど後方の部分に入れてあげるとちょうどいい感じです。
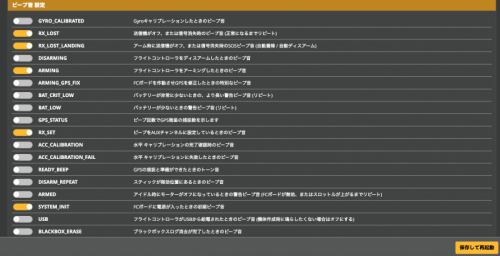
ちなみにデフォルトの設定だと、ブザーがなりません(基本設定のブザーのらんにチェックが1個も入っていないため)。
お好みにで基本設定のブザーの部分のチェックを入れてあげればOK。
Emax Tinyhawk II Freestyle VTXの変更
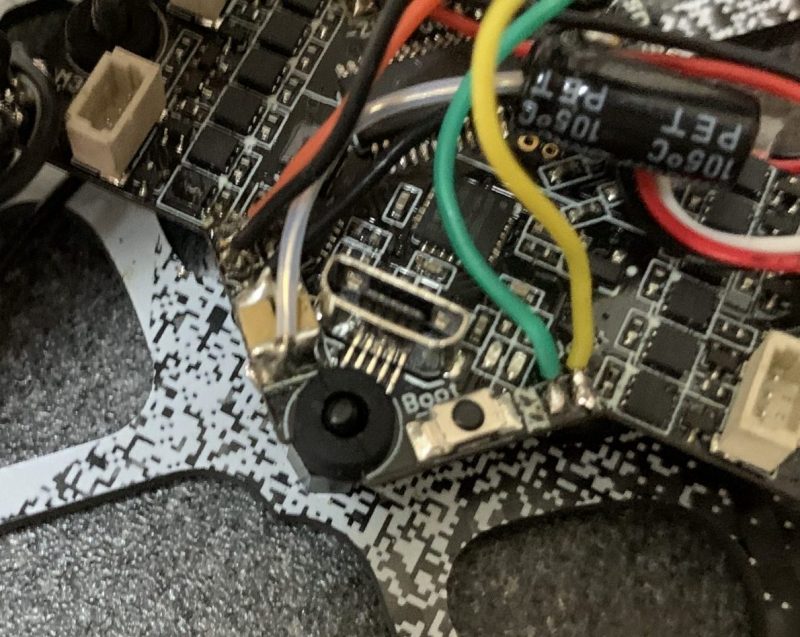
スペック的には変わらないのですが、開局しているVTXに変更しました。
デフォルトのVTXはピンコネクタで止まっているので、はんだで溶かしてとりはずし。
配線は上の画像で左から「電源」「アース」「スマートオーディオ 」「ビデオ」の順になっています。
ちなみに「Runcam TX200U」に変更しました。
VTXの周波数が25mw から変わらない問題発生。
以下のコマンドでOFFに設定したら、なおりました。
set vtx_low_power_disarm = OFF
アームしても周波数が25mwだったので、別に関係ないかもしれない、、、
上のコマンドはアームしていない時の周波数を最小周波数にするものなので。
ベータフライト4.1.XになってからVTXテーブルを作るようになってから、周波数問題とかいろいろあって面倒。
前はVTX交換してもポートのところいじるくらいでうまく機能したような気がするのですが、、、、
Emax Tinyhawk II Freestyle バインド
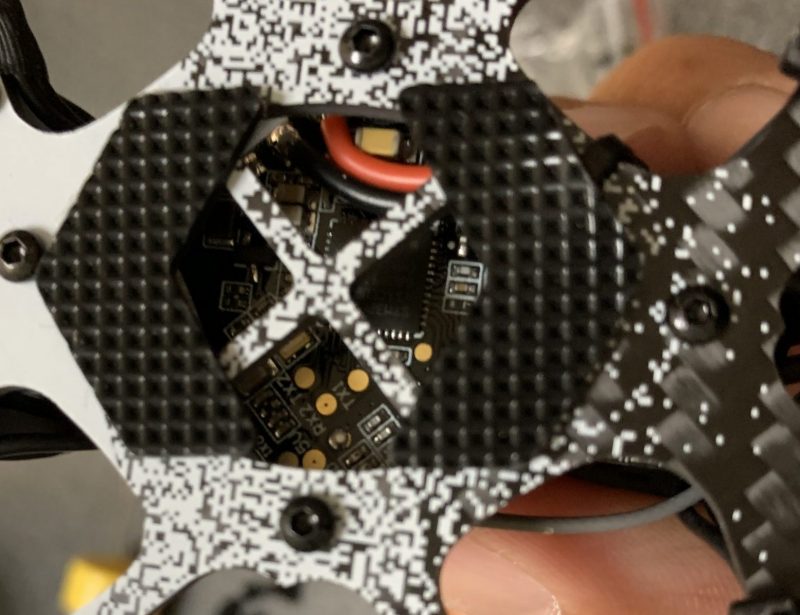
バインド方法は裏側にバインドボタンがあるので、電源を入れた状態でボタンをおしてあげて、そのあと送信機側からバインド操作を行えばOKです。
Emax Tinyhawk II Freestyle 外部受信機の取り付け
SBUSのポートがあるので、ここにハンダつけをすれば外部受信機の取り付けも可能。
とりあえず取り付けるか考え中(後日取り付けました)。
本日飛ばしてきたのですが、100m程度なら、内部のFrskyのレシーバーでもRXLOSSがそこまで発生しなかったんですよね〜
一度、木のかげに隠れるような場所、飛距離だと50mくらいでRXLOSSが発生しましたが、すぐに復帰したし。
Crazybee系のFCによく内蔵されているFrskyなんかより、RXLOSSはあまり発生しないように感じました。
まぁそこそこ飛距離だすなら、外部受信機をつけるといいと思います。
こちらの動画は内部受信機で飛ばしている動画。
動画1分くらいでRXLOSSが1回発生しています
追記:結局Frsky XM+に変更しました
デフォルトの内部受信機でも、そこまで悪くなかったのですが、RXLOSS対策として「Frsky XM+」に変更しました。

取り付け位置は上の画像の部分です。
左からSBUS、5V、アース、です。
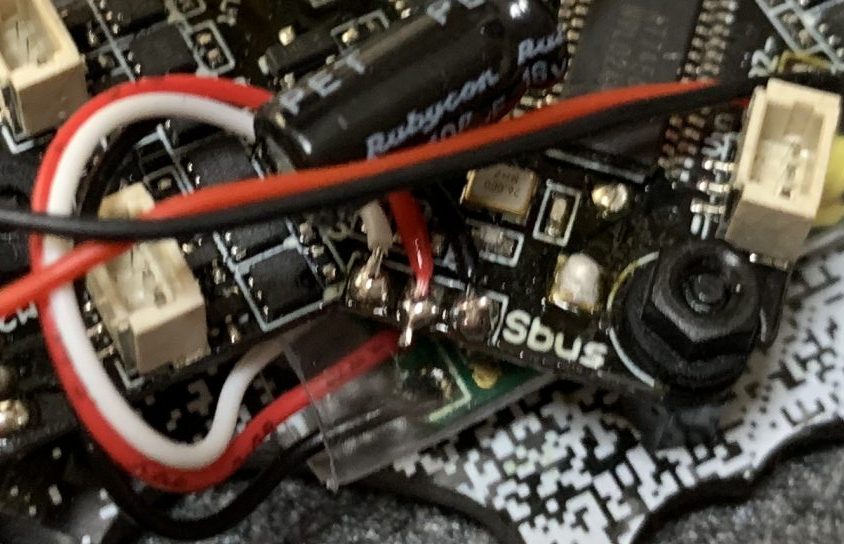
わかりずらいですが、取り付け後の画像はこんな感じ。
ベーターフライトは基本設定タブのところをSBUSに変更。
ポートの部分はシリアル受信ONにすればOK。
外部受信機をつけたら、バインド切れなしでかなり快適に飛ばせるようになりました!
外部受信機を搭載した後に飛ばした動画はこちら↓
電源プラグをXT30に変更

デフォルトだと1sを2本使用するようになっているのですが、使いづらいのでXT30に電源を変更しました。
特に難しくはありませんが、基盤の裏側から作業をすることが必要。
Emax Tinyhawk II Freestyle ベーターフライトの設定
ベーターフライトは「MTKS/MATEKF411RX(STM32F411)」の4.1.0が入っていました。
自分が変更したポイントを紹介
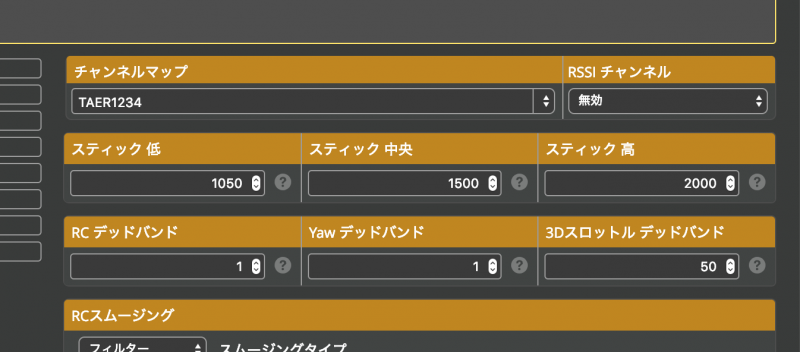
モード2なので、チャンネルマップのところを「AETR」に変更。
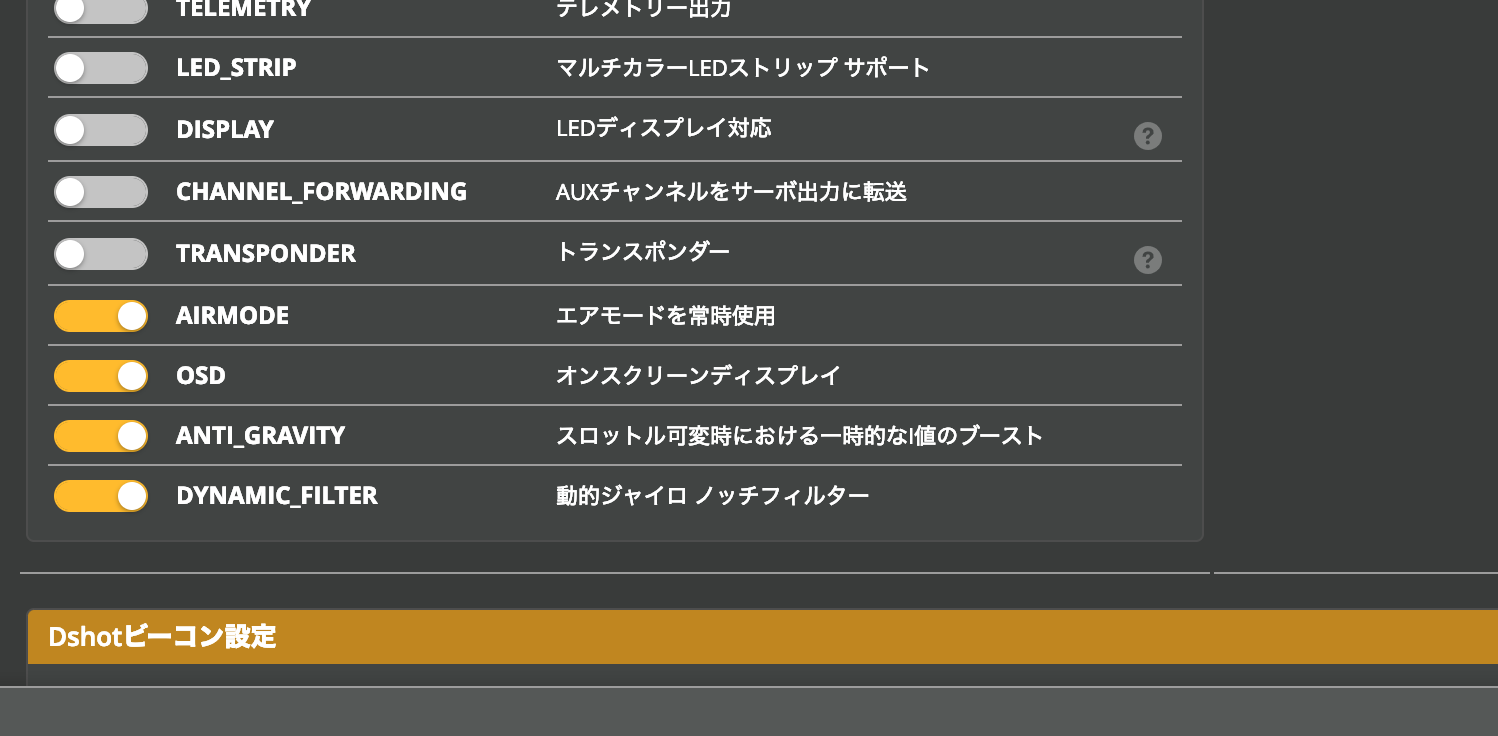
「エアモード常時使用」のチェックをはずす。
自分はモードの設定で「エアモード」「アクロモード」「アングルモード」の切り替えをできるようにしています。
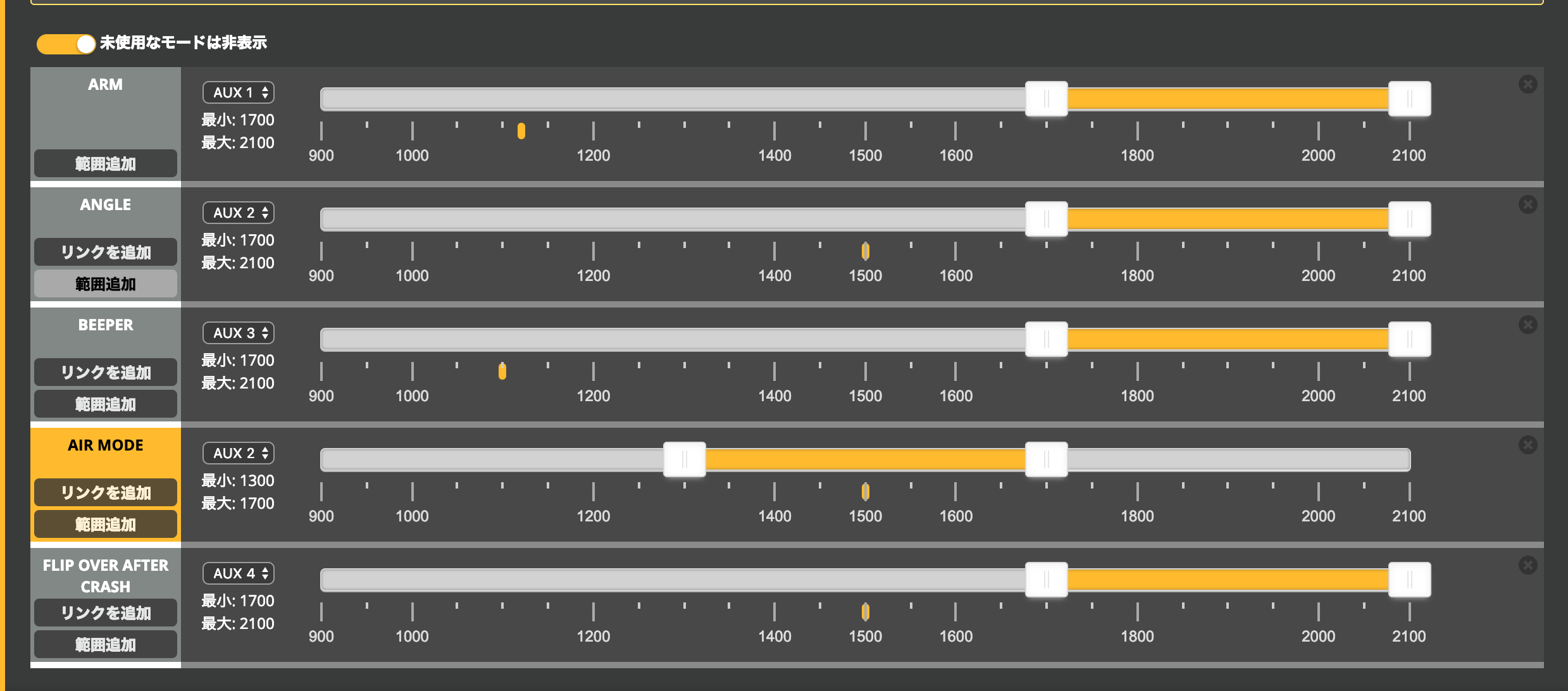
モードタブの設定はこんな感じに変更。
Rate の変更
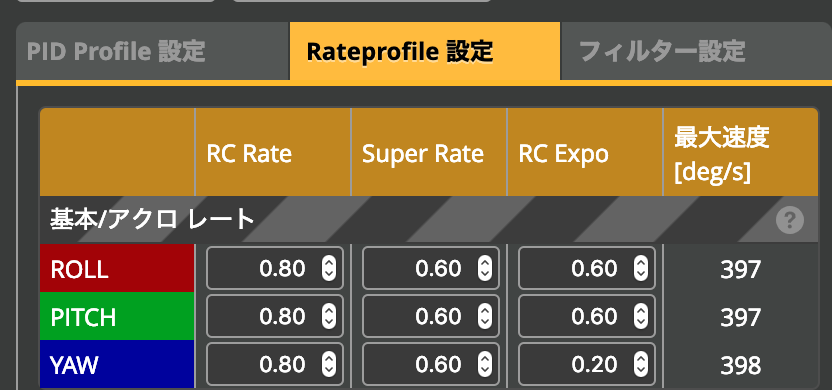
デフォルトの Rateはかなり低めになっています。
フリップしても回転しきれないぐらい、もっさりしていたので、
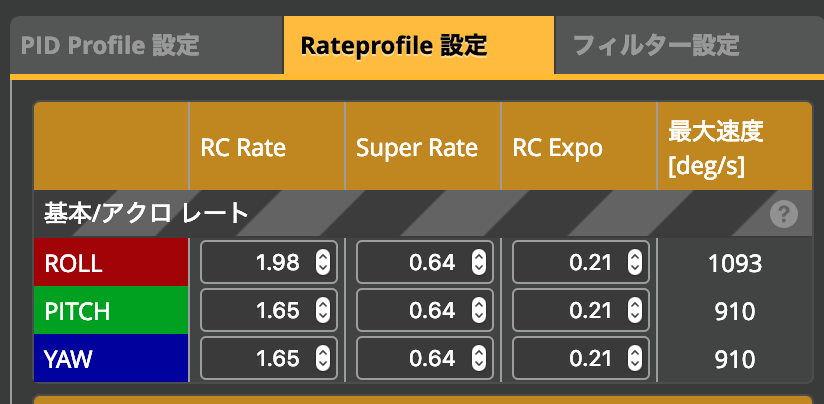
上の画像のRateに変更してます。
上で紹介ている動画はRate 変更後のもの。
まとめ
スロットルの入れ方にもよりますが、バッテリー0まで使いきれば、5分フライトもできそうです(0まで使い切るとバッテリーによくないのでやめた方がいいですけど)。
飛ばして感想は、とても軽く、気持ちよく飛ばせます。
Insta360GOを搭載して飛ばしても面白そうですね!
いろいろカスタマイズしたり楽しめるドローンだと思いますので興味のある方はチェックしてみてください。
13000円くらいで購入できます。
おすすめのFPVゴーグルランキング

マイクロドローンやレース系のFPVドローンを飛ばすにはFPVゴーグルが必要です。
おすすめのFPVゴーグルをランキング形式で3つ紹介しますので、これからマイクロドローンやレース系のドローンを飛ばしたい人は参考にしてください。
1位.Orqa FPV.One Pilot

価格は高いFPVゴーグルですが、予算に余裕があるならおすすめしたいFPVゴーグルです。
日本や海外のトップレーサーも愛用しているFPVゴーグルで、画面比率は4:3 16:9どちらにも選択可能。
さらに焦点距離の調整ができますので、老眼の方や目の悪い方でも、ジオプターレンズを入れないでも使用可能です。
画面の色合いも綺麗でみやすく最強のFPVゴーグルだと思います。
FPVゴーグルには受信モジュールがついていないので、別で受信モジュールを購入する必要があります。FPVゴーグルについてくるカバーにあう受信モジュールは「rapidfire」のみです。

2位.SKYZONE SKY04X V2

OLEDディスプレイを使用しているので画質が綺麗です。それとDVR録画映像は60fpsで撮影できて映像も綺麗です。
こちらも焦点距離の調整が可能なので老眼の方や目の悪い方でも、ジオプターレンズを入れないでも使用可能です。

3位.Eachine EV800DM

価格を抑えるなら単眼レンズのタイプのFPVゴーグルがおすすめ。とりあえずFPVドローンはどんな感じのものか試してみたい人むけのFPVゴーグルです。ただ個人的な意見になってしまいますが、FPVゴーグルだけは高いやつを選んだ方がいいです。安いものと高いものでは、映像のみえやすさがぜんぜん違います。

おすすめの送信機(プロポ)ランキング
何台か使ってみた中からおすすめの送信機を紹介します。
1位.Radiaster TX16S Mark2

「Radiaster TX16S」の新しいバージョン「Radiaster TX16S Mark2」送信機の内蔵モジュールの技適が取得されているかは、ちょっとわかりませんが、外部モジュールを使って使用すると良いと思います。
ちなみに初代の「Radiaster TX16S」は4In1に関しては技適が取得できているので、「Radiaster TX16S Mark2」も4in1に関してはたぶんぎてきOKだとは思います。

Emax Tinyhawk II Freestyle バックアップ diff all
[ac-box01 title="外部受信機に変える前 diff all"]# diff all
###WARNING: NO CUSTOM DEFAULTS FOUND###
# version
# Betaflight / STM32F411 (S411) 4.1.0 Oct 16 2019 / 11:57:34 (c37a7c91a) MSP API: 1.42
# manufacturer_id: MTKS board_name: MATEKF411RX custom defaults: NO
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name MATEKF411RX
manufacturer_id MTKS
mcu_id 004c00153239510131333334
signature
# name: TH II Freestyle
# resources
resource BEEPER 1 C15
resource MOTOR 1 B06
resource MOTOR 2 B08
resource MOTOR 3 B10
resource MOTOR 4 B07
resource PPM 1 A03
resource PWM 1 A02
resource PWM 2 A09
resource PWM 3 A10
resource LED_STRIP 1 A00
resource SERIAL_TX 1 A09
resource SERIAL_TX 2 A02
resource SERIAL_RX 1 A10
resource SERIAL_RX 2 A03
resource LED 1 C13
resource SPI_SCK 1 A05
resource SPI_SCK 2 B13
resource SPI_SCK 3 B03
resource SPI_MISO 1 A06
resource SPI_MISO 2 B14
resource SPI_MISO 3 B04
resource SPI_MOSI 1 A07
resource SPI_MOSI 2 B15
resource SPI_MOSI 3 B05
resource ADC_BATT 1 B00
resource ADC_CURR 1 B01
resource OSD_CS 1 B12
resource RX_SPI_CS 1 A15
resource RX_SPI_EXTI 1 C14
resource RX_SPI_BIND 1 B02
resource RX_SPI_LED 1 B09
resource RX_SPI_CC2500_TX_EN 1 A08
resource RX_SPI_CC2500_LNA_EN 1 A13
resource RX_SPI_CC2500_ANT_SEL 1 A14
resource GYRO_EXTI 1 A01
resource GYRO_CS 1 A04
# timer
timer A03 AF3
# pin A03: TIM9 CH2 (AF3)
timer B10 AF1
# pin B10: TIM2 CH3 (AF1)
timer B06 AF2
# pin B06: TIM4 CH1 (AF2)
timer B07 AF2
# pin B07: TIM4 CH2 (AF2)
timer B08 AF2
# pin B08: TIM4 CH3 (AF2)
timer A00 AF2
# pin A00: TIM5 CH1 (AF2)
timer A02 AF3
# pin A02: TIM9 CH1 (AF3)
timer A09 AF1
# pin A09: TIM1 CH2 (AF1)
timer A10 AF1
# pin A10: TIM1 CH3 (AF1)
# dma
dma ADC 1 0
# ADC 1: DMA2 Stream 0 Channel 0
dma pin B10 0
# pin B10: DMA1 Stream 1 Channel 3
dma pin B06 0
# pin B06: DMA1 Stream 0 Channel 2
dma pin B07 0
# pin B07: DMA1 Stream 3 Channel 2
dma pin B08 0
# pin B08: DMA1 Stream 7 Channel 2
dma pin A00 0
# pin A00: DMA1 Stream 2 Channel 6
dma pin A09 0
# pin A09: DMA2 Stream 6 Channel 0
dma pin A10 0
# pin A10: DMA2 Stream 6 Channel 0
# feature
feature -RX_PARALLEL_PWM
feature -AIRMODE
feature MOTOR_STOP
feature OSD
feature RX_SPI
# beeper
beeper -GYRO_CALIBRATED
beeper -DISARMING
beeper -ARMING_GPS_FIX
beeper -BAT_CRIT_LOW
beeper -BAT_LOW
beeper -GPS_STATUS
beeper -ACC_CALIBRATION
beeper -ACC_CALIBRATION_FAIL
beeper -READY_BEEP
beeper -DISARM_REPEAT
beeper -ARMED
beeper -ON_USB
beeper -BLACKBOX_ERASE
beeper -CRASH_FLIP
beeper -CAM_CONNECTION_OPEN
beeper -CAM_CONNECTION_CLOSE
beeper -RC_SMOOTHING_INIT_FAIL
# beacon
beacon RX_SET
# serial
serial 1 2048 115200 57600 0 115200
# aux
aux 0 0 0 1700 2100 0 0
aux 1 1 1 1700 2100 0 0
aux 2 13 2 1700 2100 0 0
aux 3 28 1 1300 1700 0 0
aux 4 35 3 1700 2100 0 0
# vtxtable
vtxtable bands 5
vtxtable channels 8
vtxtable band 1 BOSCAM_A A FACTORY 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B FACTORY 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E FACTORY 5705 5685 5665 0 5885 5905 0 0
vtxtable band 4 FATSHARK F FACTORY 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R FACTORY 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable powerlevels 3
vtxtable powervalues 0 1 2
vtxtable powerlabels 25 100 200
# master
set gyro_lowpass2_hz = 325
set dyn_lpf_gyro_min_hz = 260
set dyn_lpf_gyro_max_hz = 650
set acc_calibration = -61,29,117
set mag_hardware = NONE
set baro_hardware = NONE
set max_check = 2000
set rssi_offset = 20
set rx_spi_protocol = FRSKY_D
set rx_spi_bus = 3
set rx_spi_led_inversion = ON
set dshot_idle_value = 800
set dshot_burst = AUTO
set motor_pwm_protocol = DSHOT600
set motor_poles = 12
set vbat_max_cell_voltage = 440
set vbat_min_cell_voltage = 320
set vbat_warning_cell_voltage = 330
set current_meter = NONE
set battery_meter = ADC
set ibata_scale = 179
set beeper_inversion = ON
set beeper_od = OFF
set small_angle = 180
set deadband = 1
set yaw_deadband = 1
set pid_process_denom = 1
set osd_warn_batt_not_full = OFF
set osd_warn_visual_beeper = OFF
set osd_warn_core_temp = OFF
set osd_warn_rc_smoothing = OFF
set osd_warn_no_gps_rescue = OFF
set osd_warn_gps_rescue_disabled = OFF
set osd_warn_rssi = ON
set osd_cap_alarm = 450
set osd_vbat_pos = 2444
set osd_rssi_pos = 396
set osd_tim_2_pos = 2453
set osd_flymode_pos = 65
set osd_vtx_channel_pos = 2434
set osd_craft_name_pos = 2088
set osd_display_name_pos = 394
set osd_pid_roll_pos = 353
set osd_pid_pitch_pos = 34
set osd_pidrate_profile_pos = 186
set osd_warnings_pos = 2345
set osd_avg_cell_voltage_pos = 374
set osd_flip_arrow_pos = 310
set osd_rate_profile_name_pos = 23
set osd_pid_profile_name_pos = 2
set osd_stat_max_spd = OFF
set osd_stat_battery = ON
set osd_stat_max_curr = OFF
set osd_stat_used_mah = OFF
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set osd_stat_total_time = ON
set system_hse_mhz = 8
set vtx_band = 4
set vtx_channel = 1
set vtx_power = 3
set vtx_low_power_disarm = UNTIL_FIRST_ARM
set vtx_freq = 5740
set vcd_video_system = NTSC
set max7456_spi_bus = 2
set frsky_spi_tx_id = 49,107
set frsky_spi_offset = -26
set frsky_spi_bind_hop_data = 0,30,60,91,120,150,180,210,5,35,65,95,125,155,185,215,10,40,70,100,130,160,190,221,15,45,75,105,135,165,195,225,20,50,80,110,140,170,200,230,25,55,85,115,145,175,205,0,0,0
set cc2500_spi_chip_detect = OFF
set gyro_1_bustype = SPI
set gyro_1_spibus = 1
set gyro_1_sensor_align = CW270
set gyro_1_align_yaw = 2700
set gyro_2_spibus = 1
set name = TH II Freestyle
profile 0
# profile 0
set dyn_lpf_dterm_min_hz = 0
set dyn_lpf_dterm_max_hz = 250
set dterm_lowpass_hz = 100
set dterm_lowpass2_hz = 200
set feedforward_transition = 25
set acc_limit_yaw = 100
set iterm_rotation = ON
set iterm_relax = RPY
set iterm_relax_type = GYRO
set iterm_relax_cutoff = 11
set iterm_windup = 40
set iterm_limit = 150
set throttle_boost = 4
set p_pitch = 73
set i_pitch = 85
set d_pitch = 53
set f_pitch = 70
set p_roll = 70
set i_roll = 94
set d_roll = 54
set f_roll = 70
set p_yaw = 75
set d_yaw = 13
set f_yaw = 80
set angle_level_strength = 60
set horizon_level_strength = 30
set horizon_transition = 80
set level_limit = 30
set d_min_roll = 0
set d_min_pitch = 0
set auto_profile_cell_count = 2
set ff_boost = 13
profile 1
# profile 1
set dyn_lpf_dterm_min_hz = 0
set dyn_lpf_dterm_max_hz = 250
set dterm_lowpass_hz = 100
set dterm_lowpass2_hz = 200
set feedforward_transition = 25
set acc_limit_yaw = 100
set iterm_rotation = ON
set iterm_relax = RPY
set iterm_relax_type = GYRO
set iterm_relax_cutoff = 11
set iterm_windup = 40
set iterm_limit = 150
set throttle_boost = 4
set p_pitch = 70
set d_pitch = 55
set f_pitch = 70
set p_roll = 70
set i_roll = 90
set d_roll = 55
set f_roll = 70
set p_yaw = 75
set d_yaw = 13
set f_yaw = 80
set angle_level_strength = 60
set horizon_level_strength = 30
set horizon_transition = 80
set level_limit = 30
set d_min_roll = 0
set d_min_pitch = 0
set auto_profile_cell_count = 2
profile 2
# restore original profile selection
profile 0
rateprofile 0
# rateprofile 0
set thr_expo = 50
set roll_rc_rate = 198
set pitch_rc_rate = 165
set yaw_rc_rate = 165
set roll_expo = 21
set pitch_expo = 21
set yaw_expo = 21
set roll_srate = 64
set pitch_srate = 64
set yaw_srate = 64
set tpa_rate = 25
set tpa_breakpoint = 1650
rateprofile 1
# rateprofile 1
set thr_mid = 20
set thr_expo = 50
set roll_rc_rate = 80
set pitch_rc_rate = 80
set yaw_rc_rate = 80
set roll_expo = 60
set pitch_expo = 60
set yaw_expo = 20
set roll_srate = 60
set pitch_srate = 60
set yaw_srate = 60
set tpa_rate = 45
set tpa_breakpoint = 1450
set throttle_limit_type = SCALE
set throttle_limit_percent = 75
rateprofile 2
# rateprofile 2
set thr_mid = 0
rateprofile 3
rateprofile 4
rateprofile 5
# restore original rateprofile selection
rateprofile 0
# save configuration
save
[/ac-box01]
[ac-box01 title="最終的にとったバックアップdiff all"]# diff all
###WARNING: NO CUSTOM DEFAULTS FOUND###
# version
# Betaflight / STM32F411 (S411) 4.1.0 Oct 16 2019 / 11:57:34 (c37a7c91a) MSP API: 1.42
# manufacturer_id: MTKS board_name: MATEKF411RX custom defaults: NO
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name MATEKF411RX
manufacturer_id MTKS
mcu_id 004c00153239510131333334
signature
# name: TH II Freestyle
# resources
resource BEEPER 1 C15
resource MOTOR 1 B06
resource MOTOR 2 B08
resource MOTOR 3 B10
resource MOTOR 4 B07
resource PPM 1 A03
resource PWM 1 A02
resource PWM 2 A09
resource PWM 3 A10
resource LED_STRIP 1 A00
resource SERIAL_TX 1 A09
resource SERIAL_TX 2 A02
resource SERIAL_RX 1 A10
resource SERIAL_RX 2 A03
resource LED 1 C13
resource SPI_SCK 1 A05
resource SPI_SCK 2 B13
resource SPI_SCK 3 B03
resource SPI_MISO 1 A06
resource SPI_MISO 2 B14
resource SPI_MISO 3 B04
resource SPI_MOSI 1 A07
resource SPI_MOSI 2 B15
resource SPI_MOSI 3 B05
resource ADC_BATT 1 B00
resource ADC_CURR 1 B01
resource OSD_CS 1 B12
resource RX_SPI_CS 1 A15
resource RX_SPI_EXTI 1 C14
resource RX_SPI_BIND 1 B02
resource RX_SPI_LED 1 B09
resource RX_SPI_CC2500_TX_EN 1 A08
resource RX_SPI_CC2500_LNA_EN 1 A13
resource RX_SPI_CC2500_ANT_SEL 1 A14
resource GYRO_EXTI 1 A01
resource GYRO_CS 1 A04
# timer
timer A03 AF3
# pin A03: TIM9 CH2 (AF3)
timer B10 AF1
# pin B10: TIM2 CH3 (AF1)
timer B06 AF2
# pin B06: TIM4 CH1 (AF2)
timer B07 AF2
# pin B07: TIM4 CH2 (AF2)
timer B08 AF2
# pin B08: TIM4 CH3 (AF2)
timer A00 AF2
# pin A00: TIM5 CH1 (AF2)
timer A02 AF3
# pin A02: TIM9 CH1 (AF3)
timer A09 AF1
# pin A09: TIM1 CH2 (AF1)
timer A10 AF1
# pin A10: TIM1 CH3 (AF1)
# dma
dma ADC 1 0
# ADC 1: DMA2 Stream 0 Channel 0
dma pin B10 0
# pin B10: DMA1 Stream 1 Channel 3
dma pin B06 0
# pin B06: DMA1 Stream 0 Channel 2
dma pin B07 0
# pin B07: DMA1 Stream 3 Channel 2
dma pin B08 0
# pin B08: DMA1 Stream 7 Channel 2
dma pin A00 0
# pin A00: DMA1 Stream 2 Channel 6
dma pin A09 0
# pin A09: DMA2 Stream 6 Channel 0
dma pin A10 0
# pin A10: DMA2 Stream 6 Channel 0
# feature
feature -RX_PARALLEL_PWM
feature -AIRMODE
feature RX_SERIAL
feature MOTOR_STOP
feature OSD
# beeper
beeper -GYRO_CALIBRATED
beeper -DISARMING
beeper -ARMING_GPS_FIX
beeper -BAT_CRIT_LOW
beeper -BAT_LOW
beeper -GPS_STATUS
beeper -ACC_CALIBRATION
beeper -ACC_CALIBRATION_FAIL
beeper -READY_BEEP
beeper -DISARM_REPEAT
beeper -ARMED
beeper -ON_USB
beeper -BLACKBOX_ERASE
beeper -CRASH_FLIP
beeper -CAM_CONNECTION_OPEN
beeper -CAM_CONNECTION_CLOSE
beeper -RC_SMOOTHING_INIT_FAIL
# beacon
beacon RX_SET
# serial
serial 0 64 115200 57600 0 115200
serial 1 8192 115200 57600 0 115200
# aux
aux 0 0 0 1700 2100 0 0
aux 1 1 1 1700 2100 0 0
aux 2 13 2 1700 2100 0 0
aux 3 28 1 1300 1700 0 0
aux 4 35 3 1700 2100 0 0
# vtxtable
vtxtable bands 5
vtxtable channels 8
vtxtable band 1 BOSCAM_A A CUSTOM 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B CUSTOM 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E CUSTOM 5705 5685 5665 5645 5885 5905 5925 5945
vtxtable band 4 FATSHARK F CUSTOM 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R CUSTOM 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable powerlevels 3
vtxtable powervalues 25 100 200
vtxtable powerlabels 25 100 200
# master
set gyro_lowpass2_hz = 325
set dyn_lpf_gyro_min_hz = 260
set dyn_lpf_gyro_max_hz = 650
set acc_calibration = -61,29,117
set mag_hardware = NONE
set baro_hardware = NONE
set max_check = 2000
set rssi_channel = 16
set rssi_offset = 20
set serialrx_provider = SBUS
set rx_spi_protocol = FRSKY_D
set rx_spi_bus = 3
set rx_spi_led_inversion = ON
set blackbox_device = NONE
set dshot_idle_value = 800
set dshot_burst = AUTO
set motor_pwm_protocol = DSHOT600
set motor_poles = 12
set vbat_max_cell_voltage = 440
set vbat_min_cell_voltage = 320
set vbat_warning_cell_voltage = 330
set current_meter = NONE
set battery_meter = ADC
set ibata_scale = 179
set beeper_inversion = ON
set beeper_od = OFF
set small_angle = 180
set deadband = 1
set yaw_deadband = 1
set pid_process_denom = 1
set osd_warn_batt_not_full = OFF
set osd_warn_visual_beeper = OFF
set osd_warn_core_temp = OFF
set osd_warn_rc_smoothing = OFF
set osd_warn_no_gps_rescue = OFF
set osd_warn_gps_rescue_disabled = OFF
set osd_warn_rssi = ON
set osd_cap_alarm = 450
set osd_vbat_pos = 2444
set osd_rssi_pos = 2371
set osd_tim_2_pos = 2453
set osd_flymode_pos = 65
set osd_vtx_channel_pos = 2434
set osd_craft_name_pos = 2088
set osd_display_name_pos = 394
set osd_pid_roll_pos = 353
set osd_pid_pitch_pos = 34
set osd_pidrate_profile_pos = 186
set osd_warnings_pos = 2345
set osd_avg_cell_voltage_pos = 374
set osd_flip_arrow_pos = 310
set osd_rate_profile_name_pos = 23
set osd_pid_profile_name_pos = 2
set osd_stat_max_spd = OFF
set osd_stat_battery = ON
set osd_stat_max_curr = OFF
set osd_stat_used_mah = OFF
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set osd_stat_total_time = ON
set system_hse_mhz = 8
set vtx_band = 3
set vtx_channel = 1
set vtx_power = 3
set vtx_freq = 5705
set vcd_video_system = NTSC
set max7456_spi_bus = 2
set frsky_spi_tx_id = 49,107
set frsky_spi_offset = -26
set frsky_spi_bind_hop_data = 0,30,60,91,120,150,180,210,5,35,65,95,125,155,185,215,10,40,70,100,130,160,190,221,15,45,75,105,135,165,195,225,20,50,80,110,140,170,200,230,25,55,85,115,145,175,205,0,0,0
set cc2500_spi_chip_detect = OFF
set gyro_1_bustype = SPI
set gyro_1_spibus = 1
set gyro_1_sensor_align = CW270
set gyro_1_align_yaw = 2700
set gyro_2_spibus = 1
set name = TH II Freestyle
profile 0
# profile 0
set dyn_lpf_dterm_min_hz = 0
set dyn_lpf_dterm_max_hz = 250
set dterm_lowpass_hz = 100
set dterm_lowpass2_hz = 200
set feedforward_transition = 25
set acc_limit_yaw = 100
set iterm_rotation = ON
set iterm_relax = RPY
set iterm_relax_type = GYRO
set iterm_relax_cutoff = 11
set iterm_windup = 40
set iterm_limit = 150
set throttle_boost = 4
set p_pitch = 73
set i_pitch = 85
set d_pitch = 53
set f_pitch = 70
set p_roll = 70
set i_roll = 94
set d_roll = 54
set f_roll = 70
set p_yaw = 75
set d_yaw = 13
set f_yaw = 80
set angle_level_strength = 60
set horizon_level_strength = 30
set horizon_transition = 80
set level_limit = 30
set d_min_roll = 0
set d_min_pitch = 0
set auto_profile_cell_count = 2
set ff_boost = 13
profile 1
# profile 1
set dyn_lpf_dterm_min_hz = 0
set dyn_lpf_dterm_max_hz = 250
set dterm_lowpass_hz = 100
set dterm_lowpass2_hz = 200
set feedforward_transition = 25
set acc_limit_yaw = 100
set iterm_rotation = ON
set iterm_relax = RPY
set iterm_relax_type = GYRO
set iterm_relax_cutoff = 11
set iterm_windup = 40
set iterm_limit = 150
set throttle_boost = 4
set p_pitch = 70
set d_pitch = 55
set f_pitch = 70
set p_roll = 70
set i_roll = 90
set d_roll = 55
set f_roll = 70
set p_yaw = 75
set d_yaw = 13
set f_yaw = 80
set angle_level_strength = 60
set horizon_level_strength = 30
set horizon_transition = 80
set level_limit = 30
set d_min_roll = 0
set d_min_pitch = 0
set auto_profile_cell_count = 2
profile 2
# restore original profile selection
profile 0
rateprofile 0
# rateprofile 0
set thr_expo = 50
set roll_rc_rate = 198
set pitch_rc_rate = 165
set yaw_rc_rate = 165
set roll_expo = 21
set pitch_expo = 21
set yaw_expo = 21
set roll_srate = 64
set pitch_srate = 64
set yaw_srate = 64
set tpa_rate = 25
set tpa_breakpoint = 1650
rateprofile 1
# rateprofile 1
set thr_mid = 20
set thr_expo = 50
set roll_rc_rate = 80
set pitch_rc_rate = 80
set yaw_rc_rate = 80
set roll_expo = 60
set pitch_expo = 60
set yaw_expo = 20
set roll_srate = 60
set pitch_srate = 60
set yaw_srate = 60
set tpa_rate = 45
set tpa_breakpoint = 1450
set throttle_limit_type = SCALE
set throttle_limit_percent = 75
rateprofile 2
# rateprofile 2
set thr_mid = 0
rateprofile 3
rateprofile 4
rateprofile 5
# restore original rateprofile selection
rateprofile 0
# save configuration
save[/ac-box01]